
MissRover è una piattaforma robotica mobile, progettata per rientrare nella categoria degli AMR - Autonomous Mobile Robot. Questi robot sono dotati di sensoristica e sono guidati da algoritmi di intelligenza artificiale per poter navigare in completa autonomia in ambienti non strutturati. Negli ultimi anni gli AMR stanno iniziando a diffondersi nel mercato con lo scopo di andare a sostituire i più noti AGV – Automated Guided Vehicle. Mentre gli AGV sono in grado di muoversi su percorsi predisposti in ambiente ben strutturati, gli AMR hanno la capacità di sapersi adattare a situazioni di imprevisto che si possono verificare durante la loro movimentazione. MissRover è un progetto interno eterogeneo con lo scopo di unire le varie competenze acquisite da Mister Smart Innovation nel corso del tempo. MissRover è stata realizzata utilizzando solo software opensource, consentendo così di avere un sistema aperto e predisposto ad eventuali collaborazioni.
 MissRover AMR - Autonomous Mobile Robot
MissRover AMR - Autonomous Mobile Robot
MissRover è un AMR progettata per poter interagire con persone all’interno di un ambiente. Al momento prevede due tipologie di controllo:
- teleoperato
- autonomo
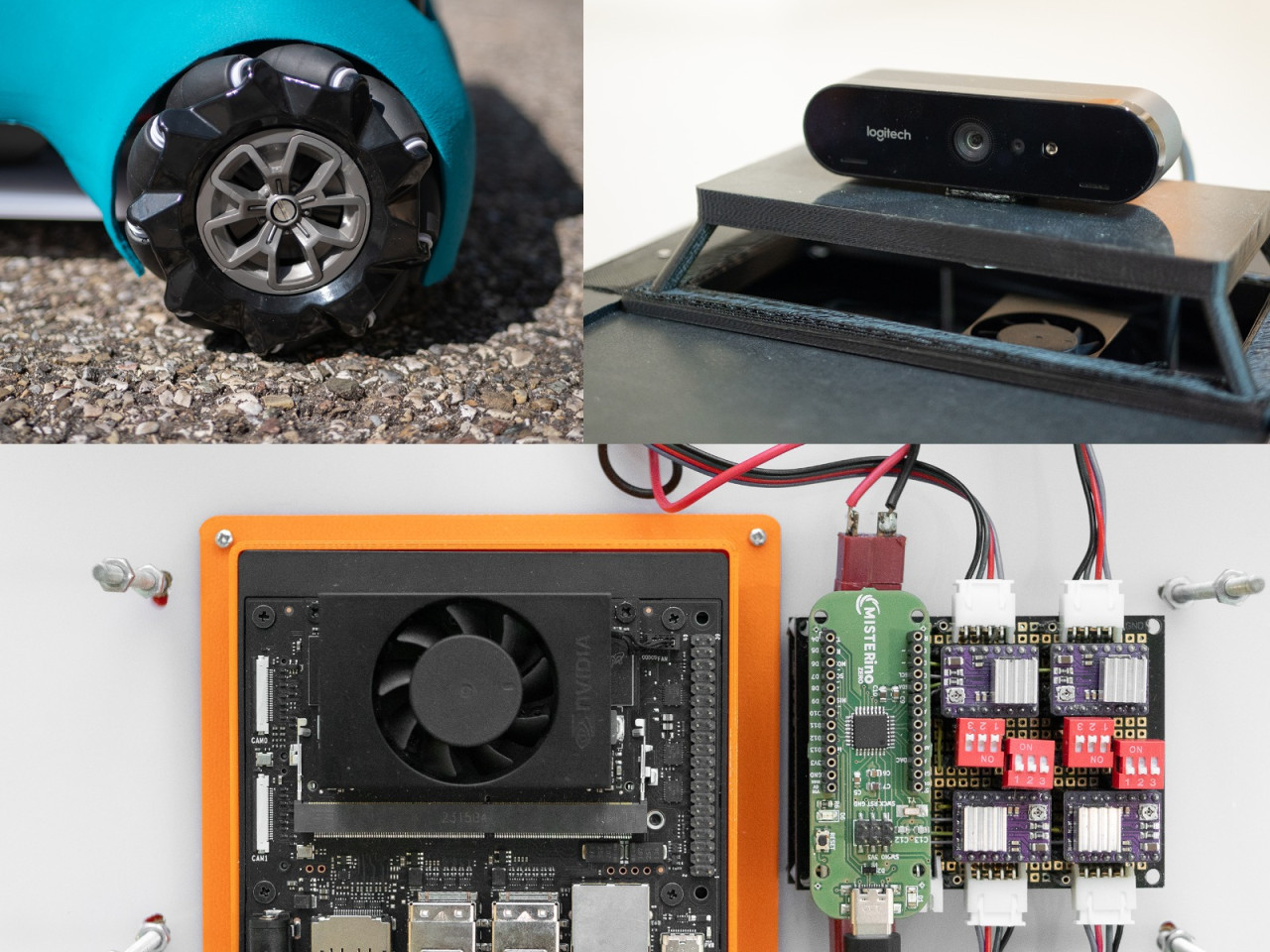
Allo stato attuale presenta le seguenti caratteristiche tecniche:
- Meccanica:
- 4 x ruote mecanum
- 3D printed part: scocca e parti interne
- Elettronica
- Attuatori:
- 4 x motori stepper
- 4 x motoriduttori (1:10)
- Sensori:
- Camera Logitech BRIO STREAM
- Schede di controllo:
- Misterino_zero
- Nvidia Jetson Orin Nano
- Alimentazione:
- power: 2 x batteria Lipo 3s 35C 2200mAh 11.1V
- logic: powerbank 50000mAh, DC output max 19.5V, 4.7A, 90W
- Attuatori:
- Software opensource:
- ultimaker-cura
- Blender
- ArduinoIDE
- ROS2 e micro-ROS
- Ultralytics YOLO
MissRover è stata progettata unendo le varie competenze messe a disposizione da Mister Smart Innovation. Questo ha permesso di mettere a punto una “catena di montaggio” per la realizzazione di prototipi dalla A alla Z, che ricopre tutte le aree di progettazione, da quella meccanica, elettrica, fino a quella software.
La prototipazione delle componenti stampate in 3D ha visto l’utilizzo di Blender, uno strumento software non nato per la progettazione CAD.
La parte di controllo dI MissRover vede l’utilizzo di ROS2 e micro-ROS: framework opensource per la progettazione rapida di dispositivi robotici, veri e propri standard per la progettazione robotica in ambito di ricerca.
MissRover fa parte dei dispositivi di edge-computing grazie alla sua piattaforma NVIDIA Jetson Orin Nano. Di fatto, è questa piattaforma che permette a MissRover di rientrare nella categoria degli AMR, essendo in grado di eseguire onerosi algoritmi di Intelligenza Artificiale on board, al fine di automatizzare la navigazione.
Le principali applicazioni di MissRover sono in ambito metalmeccanico. Le imprese del settore hanno infatti mostrato interesse per la categoria degli AMR.
La standardizzazione di MissRover, grazie all’utilizzo di software opensource, ha stimolato all’interno di Mister la collaborazione con nuovi progetti. Sviluppando tematiche legate all’Intelligenza Artificiale, robotica, IoT ed altro ancora, si intende valorizzare la duttilità di MissRover nei vari campi di applicazione. MissRover ha come scopo principale la possibilità di interagire con applicazioni di terze parti, hardware o software.
 MissRover tecnologie utilizzate
MissRover tecnologie utilizzate
MissRover ha visto una prima applicazione nell’integrazione con un sistema di visione per il riconoscimento di essere umani, permettendo di testare il sistema di visione in condizioni diverse da quelle dove era stato sviluppato, evidenziandone i limiti e permettendo quindi di essere migliorato in termini di affidabilità e robustezza. Prossima applicazione di MissRover sarà quella di essere integrata ad una camera 360, al fine di poter sviluppare contenuti interattivi in contesti dinamici.
MissRover nasce da un progetto per un sistema di visione di riconoscimento dell’essere umano su piattaforma mobile: una sua naturale applicazione è sicuramente quella di poter testare sistemi di intelligenza artificiale in ambienti dinamici e non statici, al fine di poterne migliorare le prestazioni. La piattaforma NVIDIA Jetson Orin Nano permette di poter integrare e testare i più recenti algoritmi di intelligenza artificiale. Questa elaborazione dati on-board garantisce a MissRover di avere basse latenze tra l’elaborazione dati e la fase decisionale nel processo di navigazione: ciò lo rende adatto ai sistemi real-time dove lo scheduling dei task è soggetto a severe restrizioni temporali.
Dotata di motori ad alta precisione, e di una struttura relativamente semplice, MissRover ha come suo core applicativo l’integrazione con terze parti (umane, robotiche, o automatizzate) dove viene richiesta la movimentazione di oggetti ad alta precisione. La sua progettazione tramite i framework ROS lo rende facilmente integrabile con altre piattaforme robotiche, come bracci antropomorfi, oppure altri sistemi AMR. Le sue ruote mecanum lo rendono adatto per movimentazione in ambienti che presentano una pavimentazione regolare, anche con spazi ridotti. Quindi macrocategorie come la domotica, il manifatturiero, la logistica, l’ambito medicale, sono sicuramente ottime soluzioni di applicazione.
Miss Rover è stata realizzata in toto dai ricercatori di MISTER SMART INNOVATION.
MissRover è stata presentata per la prima volta alla fiera Research to Business 2024, suscitando l’interesse di molti visitatori.
Inoltre, è stato realizzato un video dimostrativo di MissRover, pubblicato sul canale YouTube Mister Smart Innovation. È possibile vedere il video al seguente link:
https://www.youtube.com/watch?v=FllDS9WFJqw
 MissRover robot versatile per il settore metalmeccanico
MissRover robot versatile per il settore metalmeccanico