
Il progetto NAIADI ha sviluppato una nuova famiglia di “robot” acquatici a zero impatto ambientale che utilizzano tecnologie innovative per raccogliere dati multidisciplinari (geofisici, geochimici e ambientali) utili allo studio e al monitoraggio ambientale in zone sommerse di difficile accesso, come porti, laghi, fiumi, canali e aree costiere. Lo sviluppo dei veicoli autonomi dotati di strumentazione modulare realizzati "ad hoc" per il servizio richiesto è stato condotto presso i laboratori dell'Area di Ricerca CNR di Bologna, da Proambiente, in sinergia con i ricercatori di CIRI MAM dell’Università di Bologna e con la collaborazione delle imprese Micoperi S.p.A., C.A.D.F. S.p.A., Communication Technology S.r.l., Micoperi Blue Growth S.r.l., E.T.W. di Sante Asferri, tutte attive in Emilia Romagna. CNA Innovazione si è occupata della promozione e diffusione dei risultati del progetto, finanziato dal programma POR-FESR 2014-2020 della Regione Emilia-Romagna.
 www.naiadi-project.com
www.naiadi-project.com
È stata realizzata una gamma di veicoli modulari e diversificati caratterizzati da dimensioni ridotte (es. 120 x 120 cm), propulsione elettrica ed equipaggiati con sensori fisico/chimici di tipo commerciale per l’analisi combinata della colonna d’acqua (O2, CH4, pH, ecc.) e sensori geofisici per rilievi del fondale (ecoscandaglio 50 - 200 kHz) e per analisi stratigrafiche della successione sedimentaria (Sub Bottom Profiler 2-10 kHz). La sensoristica geofisica è stata totalmente riprogettata sia nella componente di generazione che di registrazione/acquisizione del segnale acustico utilizzando tecnologie “open” tipo “Arduino” e “Raspberry Pi”. Inoltre i sensori sono stati integrati negli scafi riducendo: i) il rischio di danni alla strumentazione, ii) l'attrito con l'acqua e iii) l’ingombro esterno dei mezzi. È stato altresì realizzato il sistema di controllo della navigazione e del parco strumentale di bordo attraverso un software di controllo, interattivo, che permette di gestire in tempo reale e da remoto, attraverso una stazione portatile radio munita con portata chilometrica, sia la modalità di esecuzione del rilievo (automatica su rotte prestabilite o con guida manuale da remoto) che tutte le informazioni necessarie all’esecuzione del monitoraggio ambientale, in particolare dei parametri di navigazione (posizionamento, rotta, velocità, stato delle batterie) e dei parametri strumentali (visione sottocampionata dei dati acquisiti, dei parametri di acquisizione, ecc.).
Gli USV attualmente sul mercato sono veicoli molto costosi, spesso equipaggiati con strumentazione commerciale gestibile solo attraverso software “proprietario” e non sono sempre adattabile a veicoli di dimensioni ridotte. La flotta di veicoli sviluppata è invece facilmente trasportabile, è a zero impatto ambientale e autonoma nell’eseguire rilievi anche ripetuti nel tempo. Il costo di produzione e di esercizio del sistema è ridotto rispetto agli equivalenti commerciali grazie all’utilizzo di tecnologie “open”.
Le potenziali applicazioni sono il monitoraggio di aree di difficile accesso, ma non solo, attraverso l'esecuzione di rilievi di tipo geofisico/geochimico/ambientale in ambiti industriali, in aree ecologiche protette, in aree archeologiche subacquee e in condizioni di acqua bassa normalmente proibitive per i rilievi standard.
 Esempio di veicolo autonomo di superficie realizzato nel corso del Progetto NAIADI
Esempio di veicolo autonomo di superficie realizzato nel corso del Progetto NAIADI
RILIEVO BATIMETRICO MEDIANTE L’UTILIZZO DI VEICOLI AUTONOMI DI SUPERFICIE DI UNA PORZIONE DEL LAGO DI CASTEL DELL’ALPI (COMUNE DI SAN BENEDETTO VAL DI SAMBRO – BO)
Il rilievo batimetrico aveva lo scopo di verificare il mantenimento della capacità idrica del Lago di Castel dell’Alpi. Sono stati raccolti dati batimetrici “single beam” nella porzione del lago dove sono stati eseguiti degli scavi per l’asportazione dei sedimenti sovra-alluvionali che periodicamente provocano il parziale interramento dell’invaso, riducendone la capacità idrica ai fini antincendio. L’acquisizione dei dati lungo transetti trasversali e longitudinali all’alveo ha permesso non solo di compilare una mappa batimetrica dell’area investigata ma anche di verificare eventuali variazioni della profondità dell’invaso a circa un anno dall’esecuzione degli scavi. A tale scopo sono stati eseguiti da Proambiente S.c.r.l., su richiesta della Cooperativa di Produzione e Lavoro di Castel dell'Alpi, due rilievi batimetrici in data 7 dicembre 2017 e 14 marzo 2018 durante i quali sono stati utilizzati i "robot" acquatici sviluppati durante il Progetto NAIADI. L’attività svolta si inserisce nell’ambito del PSR (Piano Sviluppo Rurale) 2014-2020 “Interventi di conservazione della funzionalità del rio degli Ordini e ripristino della capacità d’invaso ai fini antincendio del lago di Castel dell’Alpi in comune di San Benedetto Val di Sambro (BO)”.
Cooperativa di Produzione e Lavoro di Castel dell'Alpi - Unione dei Comuni dell'Appennino Bolognese
I prototipi sviluppati hanno permesso l'esecuzione di monitoraggi ambientali a basso costo in diverse zone della penisola: Valli di Comacchio (FE) per conto del Parco del Delta, Cavo Napoleonico (FE) per conto dell'Ufficio Tecnico di Bacino, Riccione (RN) per conto di Edilimpianti2 Srl, Marina di Portoverde (RN) per conto EMC Innovation Lab Srl, Lago di Cavazzo (UD), Lago di Garda (BS).
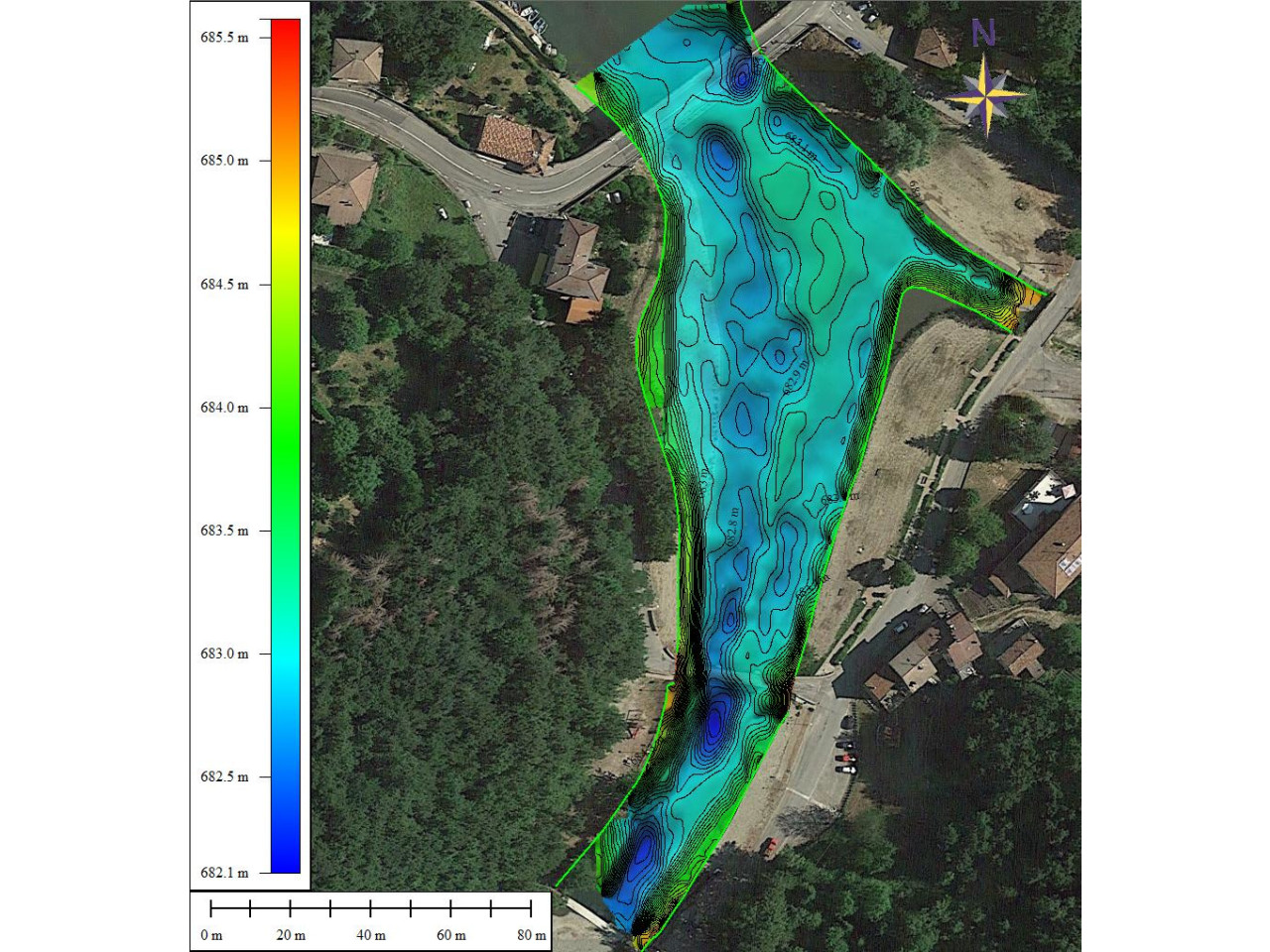 Mappa topo-batimetrica del lago di Castel dell’Alpi ottenuta dall’elaborazione dei dati acquisiti il 7 dicembre 2017. Dati batimetrici interpolati con i rilievi della parte emersa.
Mappa topo-batimetrica del lago di Castel dell’Alpi ottenuta dall’elaborazione dei dati acquisiti il 7 dicembre 2017. Dati batimetrici interpolati con i rilievi della parte emersa.