
La pianificazione del moto per manipolatori robotici sembra un problema caratterizzato da soluzioni già ben assestate. Eppure, anche in questo campo, nuove sfide vengono poste dalle nuove applicazioni, spesso non convenzionali, in cui la richiesta di automazione comporta l'impiego di robot. Tra queste, la movimentazione/manipolazione di materiali liquidi assume una particolare importanza per la vastità del campo applicativo e per le peculiarità del problema. Infatti, la movimentazione di liquidi richiede precauzioni particolari al fine di evitarne la fuoriuscita causata dall'ondeggiamento che si crea negli stessi (il fenomeno è solitamente indicato col termine inglese sloshing). La soluzione banale consiste in una drastica riduzione delle velocità e accelerazioni a cui i liquidi sono sottoposti, ma l'impiego di tecniche appropriate per la loro movimentazione consente di raggiungere prestazioni simili a quelle ottenibili con materiali solidi.
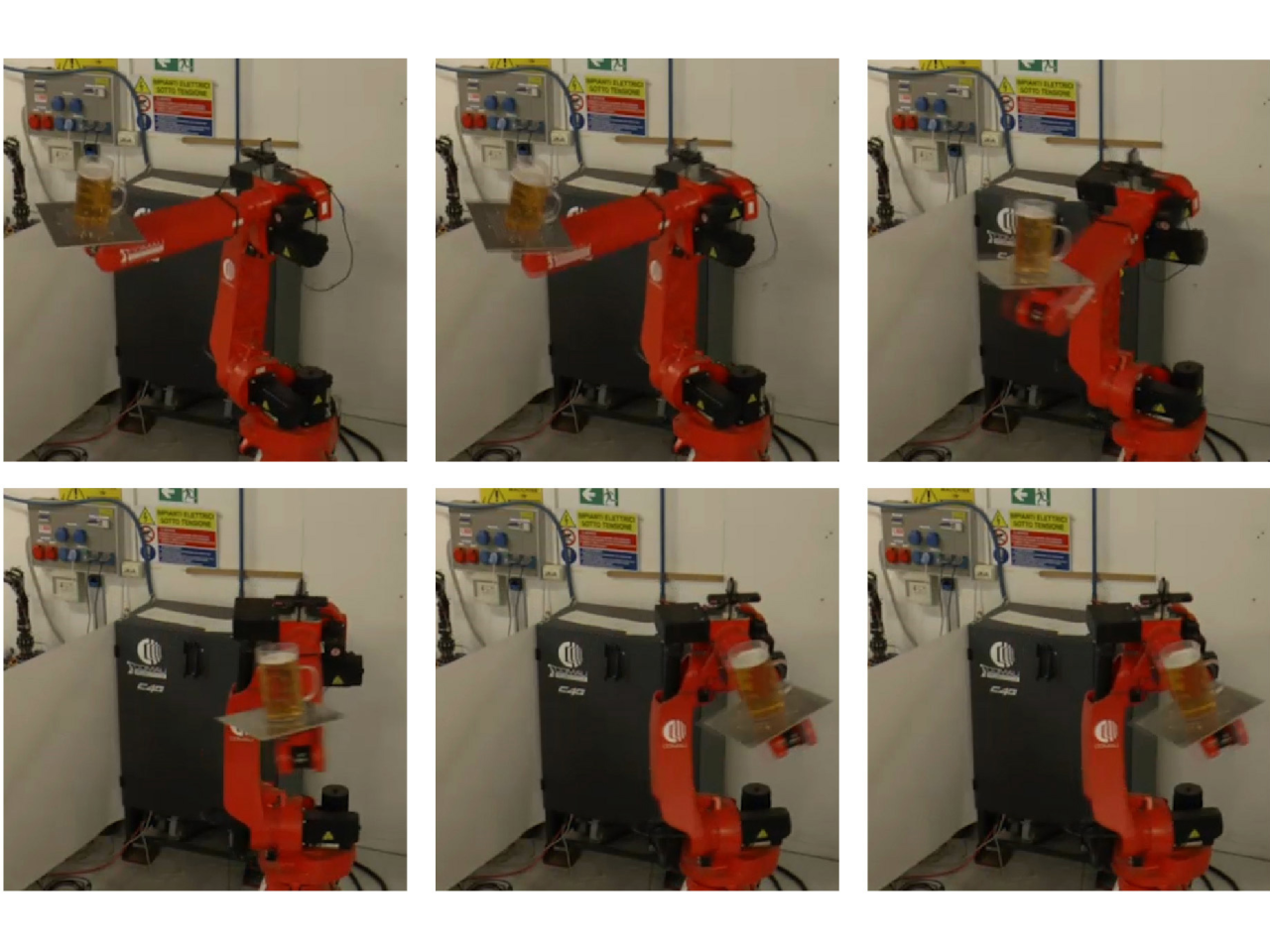 Operazione di pick-and place robotizzata di un liquido
Operazione di pick-and place robotizzata di un liquido
Le attività svolte hanno avuto come obiettivo quello di creare una libreria software che consentisse la pianificazione del moto di un robot industriale al fine di eliminare il cosiddetto fenomeno dello sloshing che colpisce tutte le applicazioni in cui un contenitore riempito di liquido viene sottoposto a delle accelerazioni (conseguenti al moto stesso). In particolare è stato realizzato un modulo plug-in (che prescinde dalle modalità di generazione delle traiettorie che il robot deve seguire e che pertanto può essere applicato a sistemi già esistenti senza modifiche strutturali dello schema di controllo o di pianificazione) che filtrando la posizione di riferimento del robot fornisce la posizione e anche l’orientamento che il contenitore deve seguire al fine di evitare fuoriuscite del liquido senza dovere ridurre velocità e accelerazioni a cui questo è sottoposto e quindi senza alcuna perdita di prestazioni rispetto alla semplice movimentazione di oggetti solidi. In aggiunta, la tecnica proposta può essere utilizzata per migliorare anche le normali operazioni di pick-and-place per oggetti non vincolati ma semplicemente supportati dall’end-effector del robot, ad esempio oggetti posti su un piatto/tavola mosso dal robot senza alcun meccanismo di ritenzione. Verifiche con un manipolatore industriale hanno dimostrato la validità delle tecniche proposte.
Le tecniche sviluppate consentono di manipolare contenitori con liquidi come se fossero di fatto solidi, riuscendo a sopprimere in maniera sostanziale lo sloshing. Le nuove tecniche agiscono anche sull’orientamento del robot (sfruttando appieno le potenzialità del manipolatore), normalmente mantenuto fisso. L’applicazione dei metodi proposti consente di svolgere operazioni di pick-and-place senza la necessità di organi di presa, ma semplicemente appoggiando gli oggetti su un supporto.
Possono beneficiare dei metodi di pianificazione e filtraggio delle traiettorie proposti tutte quelle attività che prevedono la movimentazione per mezzo di robot di materiali liquidi, in primis tutte le applicazioni legate al processamento del cibo. Secondariamente, possono trarre beneficio dalle tecniche descritte quelle applicazioni robotiche in cui l’afferraggio degli oggetti da movimentare possa risultare critico.
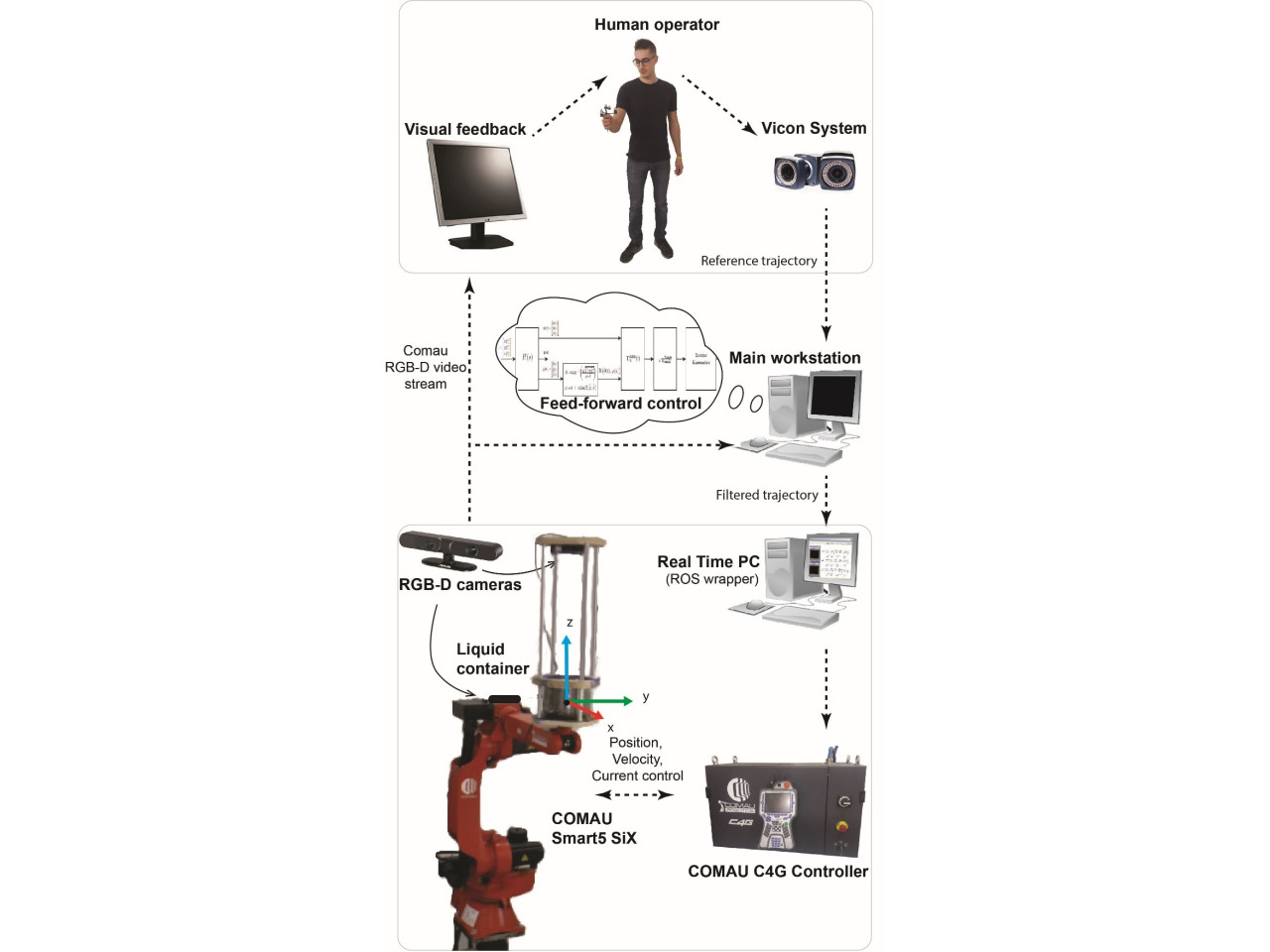 Setup sperimentale
Setup sperimentale
Le tecniche proposte per la pianificazione del moto con contestuale soppressione delle sloshing sono state impiegate per realizzare una sorta di robot cameriere in grado di muovere un contenitore colmo di liquido seguendo i comandi di un utente senza farlo fuoriuscire.
Per testare le potenzialità del metodo proposto, sono stati realizzati una serie di test basati su un recipiente riempito con acqua rigidamente collegato alla flangia di un robot industriale. E’ stata realizzata un’architettura di controllo in cui la posizione del contenitore viene comandata direttamente da un operatore umano, per dimostrare l’assoluta indipendenza delle tecniche proposte dal tipo di traiettoria. Questa viene filtrata, mediante un cosiddetto smoother che, progettato sulla base delle caratteristiche del liquido, è in grado di ridurre il livello di vibrazioni prodotte dal movimento. In aggiunta, viene imposto al contenitore un orientamento, calcolato sulla base delle accelerazioni traslazionali imposte allo stesso. In questo modo il movimento della superficie del liquido è drasticamente ridotto. Infine, partendo da considerazioni di tipo modellistico, è possibile vedere come la compensazione delle accelerazioni traslazionali mediante l’imposizione di un opportuno orientamento di fatto compensi anche le forze inerziali agenti sul contenitore. Pertanto se questo viene semplicemente appoggiato su un piatto o vassoio fissato al robot, senza alcun sistema di ritenzione, anche di fronte a movimenti estremamente veloci o bruschi rimane nella posizione iniziale. Di qui l’idea del robot cameriere in grado di movimentare un bicchiere appoggiato su un vassoio.
LIAM - Laboratorio Industriale Automazione Macchine per il packaging Industria Macchine Automatiche, SACMI Imola
Gli algoritmi sviluppati nell'ambito del progetto SINERGIE sono stati presentati presso convegni internazionali di robotica. Un video, che mostra i risultati proposti, è disponibile in una selezione del magazine online IEEE Spectrum all’indirizzzo https://youtu.be/JMVJ9w7KFQg. Alcune aziende hanno già dimostrato interesse per l'applicazione.
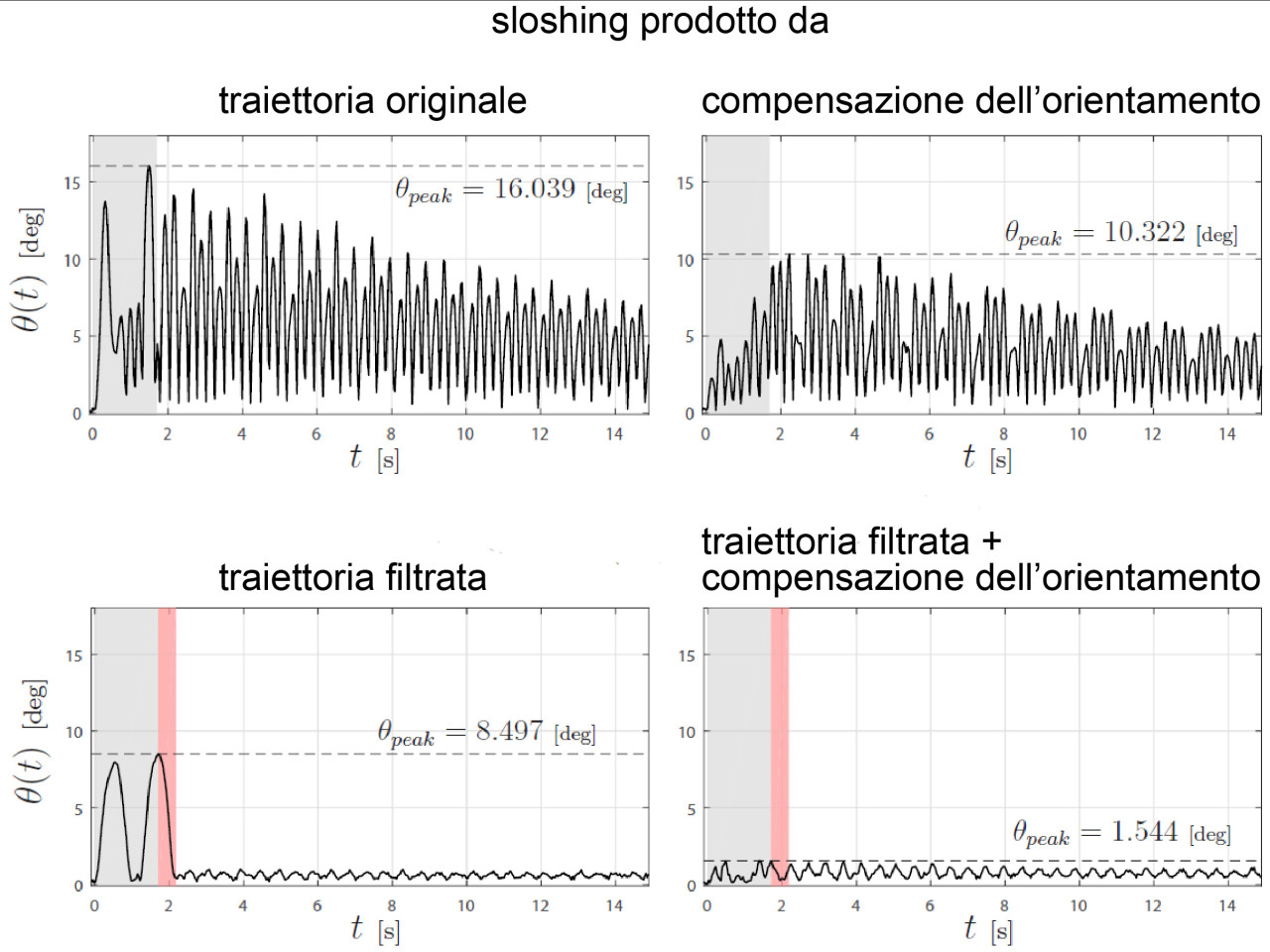 Risultati dei test
Risultati dei test