
Nell'ambito delle macchine automatiche e robot ad elevata dinamica la richiesta di velocità sempre più elevate si scontra con le esigenze di precisione e affidabilità, principalmente a causa di sistemi di controllo del moto che non riescono a garantire l’inseguimento di riferimenti con uno spettro frequenziale troppo ampio e della catena cinematica di trasmissione del moto, spesso fonte di vibrazioni dovute alle elasticità strutturali inevitabilmente presenti. Per questo motivo nella scelta del riferimento occorre superare il classico approccio basato su vincoli cinematici (su velocità e accelerazione) e tenere in considerazione anche le caratteristiche dinamiche dell'attuazione e della trasmissione del moto. In quest’ottica sono stati sviluppati nuovi profili di moto e nuovi strumenti analitici, che consentono di generalizzare le traiettorie doppia-S, ormai standard in ambito industriale, e di ottimizzarne la scelta dei parametri al fine di minimizzare fenomeni vibratori.
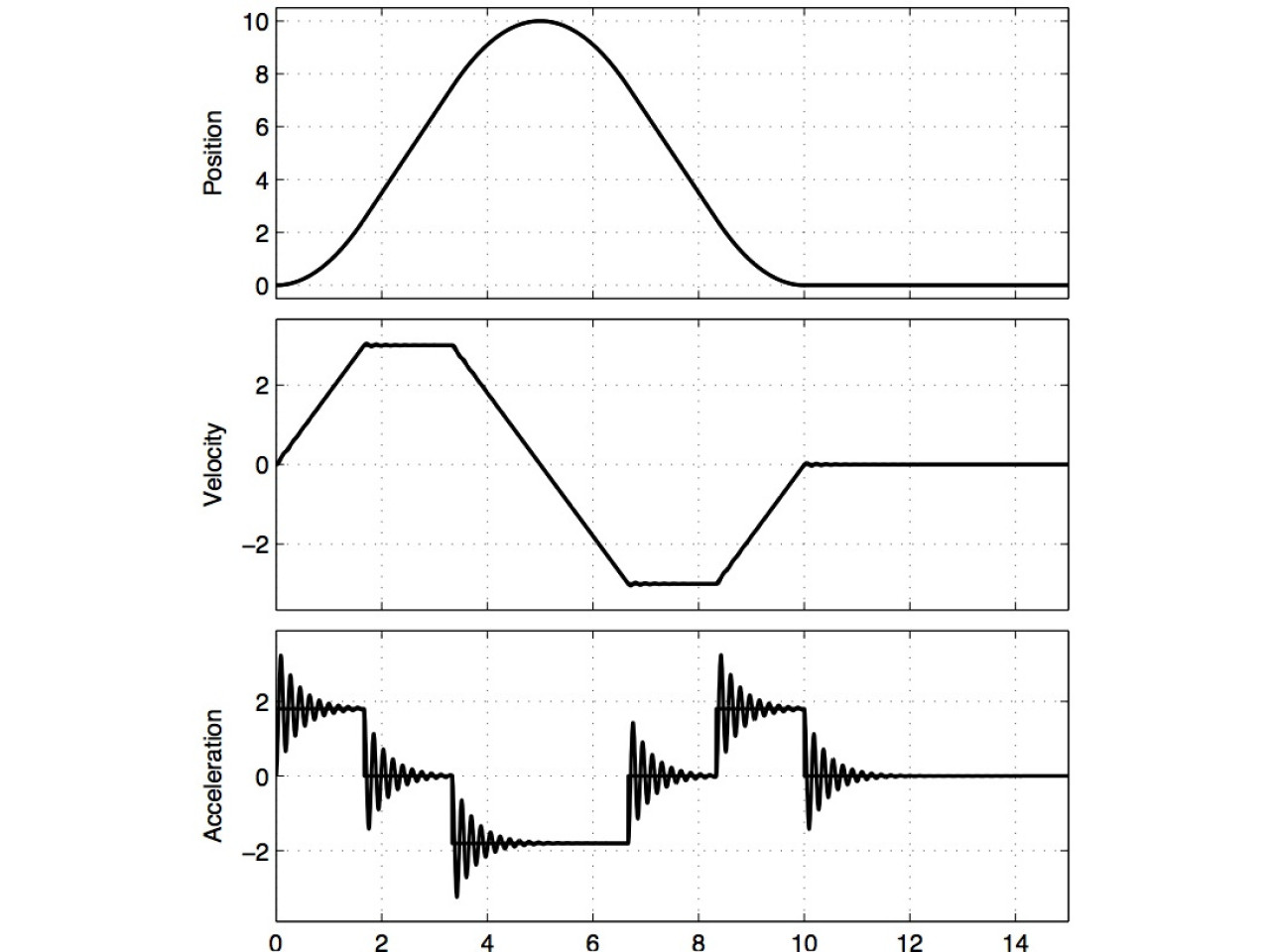 Una traiettoria non ottimale può generare vibrazioni
Una traiettoria non ottimale può generare vibrazioni
Gli algoritmi di generazione del moto proposti hanno l’obbiettivo di realizzare movimenti in tempo-minimo nel rispetto di vincoli su velocità e accelerazione imposti dal sistema di attuazione o dalla specifica applicazione e riducendo il più possibile (idealmente cancellando) le vibrazioni indotte dal sistema di trasmissione del moto che inevitabilmente presenta delle elasticità strutturali. Essendo realizzato mediante filtri dinamici, il pianificatore di moto può essere implementato per lavorare online e reagire in tempo reale a eventi non noti a priori, ad esempio in risposta a determinati segnali provenienti dai sensori collocati nella macchina. Questo permette di aumentare la flessibilità della macchina stessa, ma al tempo stesso non richiede elevate capacità di calcolo. Infatti un’altra caratteristica del generatore di traiettorie proposto è l’estrema efficienza computazionale, che ne permette l’impiego in applicazioni con tempo di ciclo ben al di sotto di 1ms.
Le tecniche di generazione delle traiettorie sviluppate rappresentano un’evoluzione delle traiettorie doppia-S, comunemente utilizzate, in ambito industriale per due motivi principali: 1)consentono di pianificare il movimento in tempo reale, magari in conseguenza di segnali esterni. 2) E’ possibile pianificare il movimento imponendo vincoli su grandezze cinematiche quali velocità e accelerazione, ma anche tenendo in considerazione le caratteristiche dinamiche del sistema di attuazione e del carico e in particolare dei modi risonanti che li caratterizzano.
Nella progettazione delle machine, la scelta degli algoritmi per la pianificazione del moto, insieme a nuovi strumenti di progettazione/analisi , quali simulatori multi-body e software per l'analisi numerica e la simulazione dinamica, consentirebbero un’ottimizzazione della stessa anche in termini strutturali. Infine, occorre evidenziare come il generatore di traiettorie proposto, che ha la possibilità di lavorare online in maniera estremamente efficiente, può trovare impiego in tutte quelle applicazioni in cui un certo movimento dipende da eventi esterni non predicibili a priori.
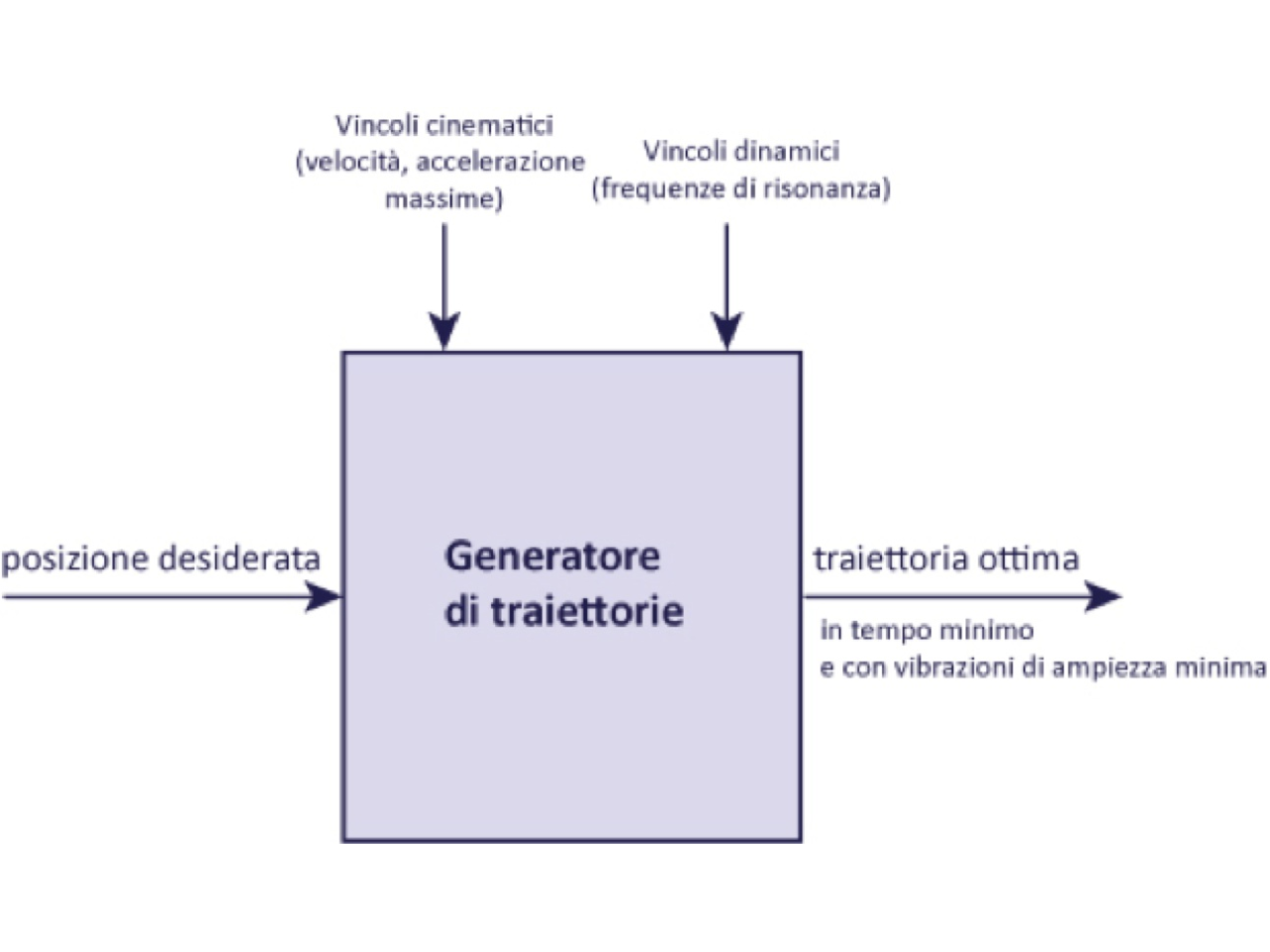 Struttura del generatore di traiettorie
Struttura del generatore di traiettorie
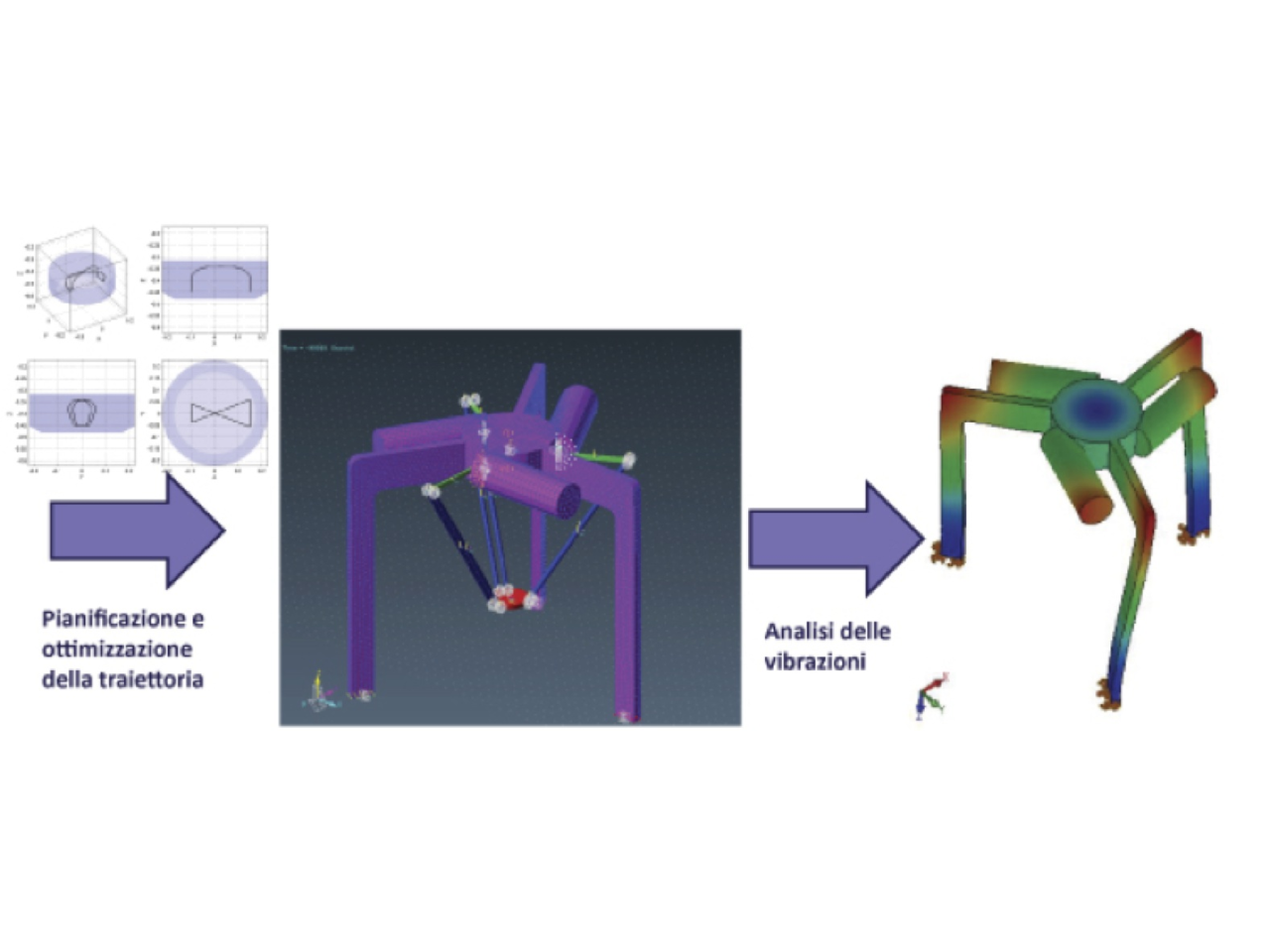
Leggi di moto per la minimizzazione delle vibrazioni in un’applicazione robotica di pick-and-place
In questa applicazione si considera un robot “delta” per lo svolgimento di operazioni di pick-and-place. A causa delle rilevanti accelerazioni in gioco, il robot induce nella struttura di sostegno vibrazioni piuttosto elevate che a lungo andare potrebbero danneggiare la struttura stessa. :::::::::::: Per questo motivo, mediante un programma di simulazione multibody (per la simulazione del robot) dotato anche di strumenti di analisi agli elementi finiti (per studiare il comportamento del sostegno), è stata analizzata l'influenza che la scelta di particolari traiettorie hanno sul sistema meccanico. Generalizzando le tecniche proposte per la soppressione delle vibrazioni nelle macchine automatiche al caso multi-dimensionale, è stata ottenuta una notevole riduzione dei fenomeni vibratori a parità di tempi di ciclo. L’ottimizzazione dei profili di moto e l’analisi dinamica hanno permesso di raggiungere un duplice risultato: 1) I profili di moto utilizzati hanno permesso di ridurre il tempo di ciclo del 50% a parità di ampiezza delle vibrazioni stesse 2) Si sono ottenuti dei criteri per la progettazione della struttura di sostegno;
IMA, aziende di macchine automatiche
I metodi di pianificazione di profili di moto sono stati usati con successo in altre applicazioni di motion control
 Ottimizzazione delle traiettorie per la riduzione delle vibrazioni sulla struttura di un Delta robot
Ottimizzazione delle traiettorie per la riduzione delle vibrazioni sulla struttura di un Delta robot