
L'evoluzione degli Automated Guided Vehicle (AGV) impiegati nella gestione dei magazzini industriali negli ultimi anni si è contraddistinta per crescente autonomia nella navigazione e flessibilità nell'esecuzione di compiti di trasporto.
Il laboratorio ha sviluppato metodi per la localizzazione di AGV e per la costruzione automatica di mappe per la navigazione.
Le soluzioni sviluppate comprendono l'estrazione di riferimenti in forma di keypoint feature direttamente dalle misure dei laser scanner a bordo del robot e tecniche innovative di registrazione tra la scansione e la mappa. Per la costruzione di mappe sono stati utilizzati sensori tridimensionali quali total station per la mappatura offline e LIDAR multistrato montati a bordo degli AGV per l'acquisizione in linea.
 AGV per la logistica di magazzino (uso concesso cortesemente da Elettric80 S.p.A.)
AGV per la logistica di magazzino (uso concesso cortesemente da Elettric80 S.p.A.)
Gli Automated Guided Vehicle (AGV) e gli Autonomous Mobile Robots (AMR) sono utilizzati da decenni nella logistica di magazzino. I sistemi commerciali più diffusi per la navigazione di AGV impiegano sensori a tecnologia laser e impiegano landmark artificiali preventivamente mappati con costi e i tempi di installazione non trascurabili. Inoltre, questi sistemi di guida sono fortemente dipendenti dalla presenza di riferimenti artificiali, non sempre collocabili con facilità in alcune aree dell'impianto, e risultano poco flessibili a mutamenti nell'ambiente o nella disposizione dei landmark.
Sebbene esista un'ampia letteratura su localizzazione e mapping di robot mobili, non tutte le soluzioni disponibili sono adatte o robuste per il funzionamento a lungo termine in contesto industriale.
L'attività di sviluppo ed i servizi offerti da CIDEA hanno prodotto alcune soluzioni algoritmiche per realizzare un sistema di navigazione di AGV allo stesso tempo flessibile e adattabile ai prodotti esistenti.
- Costruzione di mappe di navigazione a partire da misure con sensori 3D per acquisizione offline come total station a tecnologia laser e per l'acquisizione in linea come LIDAR multistrato collocati a bordo dell'AGV.
- Metodi di localizzazione basati su estrazione di riferimenti (keypoint feature) da laser scanner planare.
- Metodi di localizzazione basati su registrazione di scansioni tramite tecniche standard come ICP o avanzate come Angular Radon Spectrum (ARS).
- Costruzione automatica o semi-automatica di mappe 3D di impianto per la navigazione di AGV.
- Algoritmi di localizzazione innovativi basati su keypoint feature da scansione laser.
- Impiego di metodi registrazione allo stato dell'arte e robusti come Angular Radon Spectrum (ARS).
- Integrazione di soluzioni avanzate all'interno di prodotti e sistemi pre-esistenti.
- Sistemi di guida di AGV e AMR per il trasporto di prodotto nella gestione della logistica di fine linea e di magazzino.
- Sistemi specifici per carico e scarico di pallet da autocarri.
- Ricostruzioni tridimensionali della mappa di ambienti fuori linea ed in linea con sensori.
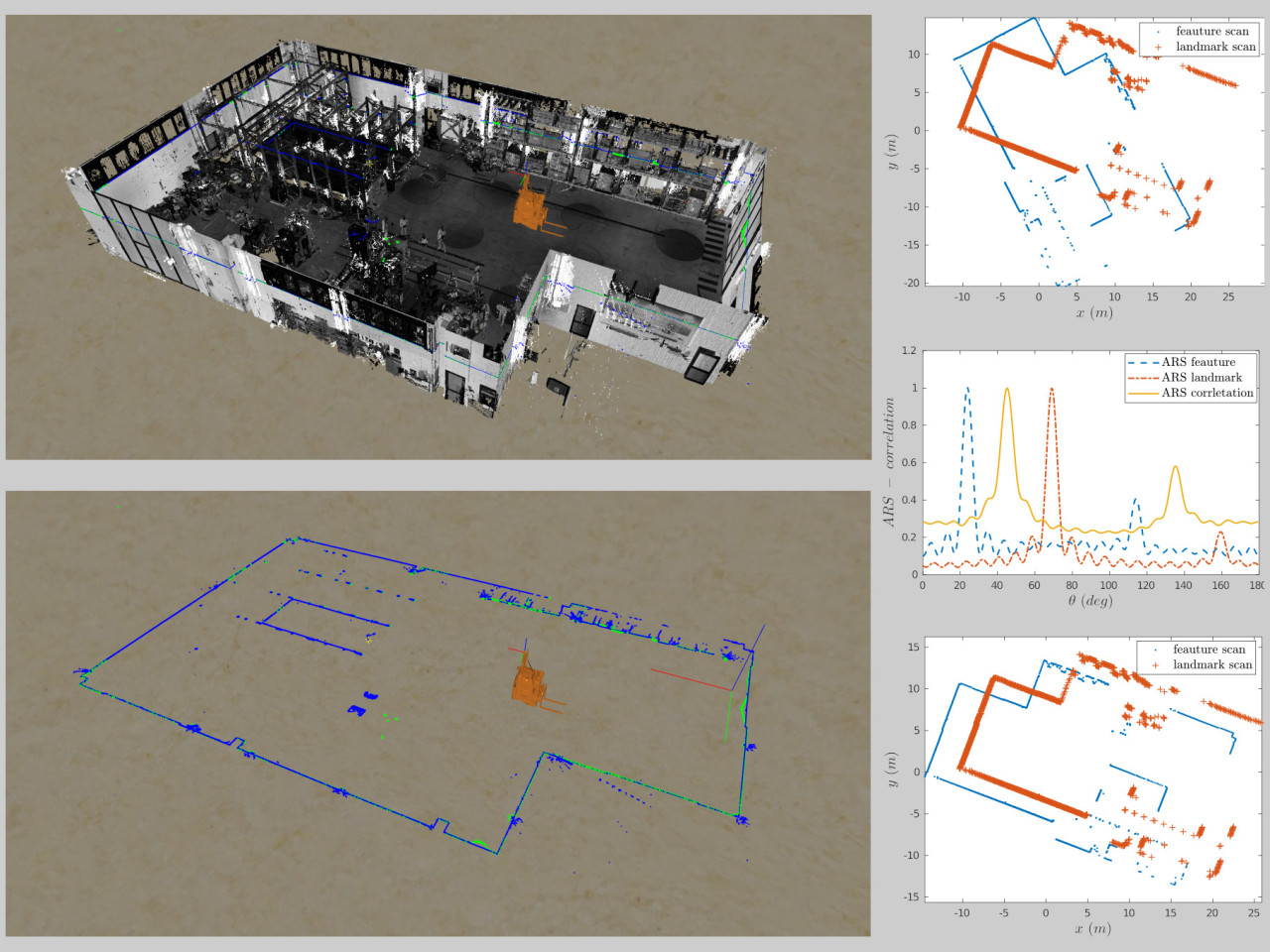 Mappa e localizzazione di AGV tramite registrazione.
Mappa e localizzazione di AGV tramite registrazione.
Dimostrazione pratica del sistema di navigazione con un massimo di tre AGV sia in ambiente di prova sia in semplice impianto.
Sono stati condotti alcuni test presso la sede della divisione di ricerca e sviluppo di Elettric80 S.p.A. a Viano volti a misurare accuratezza e precisione dei metodi di localizzazione sviluppati ed integrati nel sistema di navigazione degli AGV messi a disposizione dal partner aziendale. La mappa di navigazione è stata ottenuta dalla mappa tridimensionale acquisita con total station.
AGV ha eseguito diversi percorsi di prova raggiungendo un punto operazione al termine di tale percorso. Ciascun percorso è stato eseguito più volte con ciascuno dei metodi di localizzazione proposti. L'obiettivo era di valutare l'accuratezza e la ripetibilità del posizionamento sul punto operazione.
La prova ha dimostrato che i metodi basati su registrazione raggiungono un'accuratezza confrontabile con quella dei sistemi di navigazione commerciale con landmark artificiale.
Gli algoritmi di localizzazione più promettenti sono stati successivamente impiegati per la navigazione di un singolo AGV all'interno di un magazzino di un'azienda cliente di dimensione ridotta e topologicamente semplice. Pur non essendo stato possibile svolgere misure quantitative di accuratezza, il nuovo metodo di localizzazione ha permesso il regolare funzionamento dell'impianto per tutta la durata della prova.
CIDEA - Università degli Studi di Parma
Elettric80 S.p.A.
I metodi di localizzazione e di mapping sono a disposizione dell'azienda partner che ha commissionato e partecipato all'attività di ricerca e sviluppo.
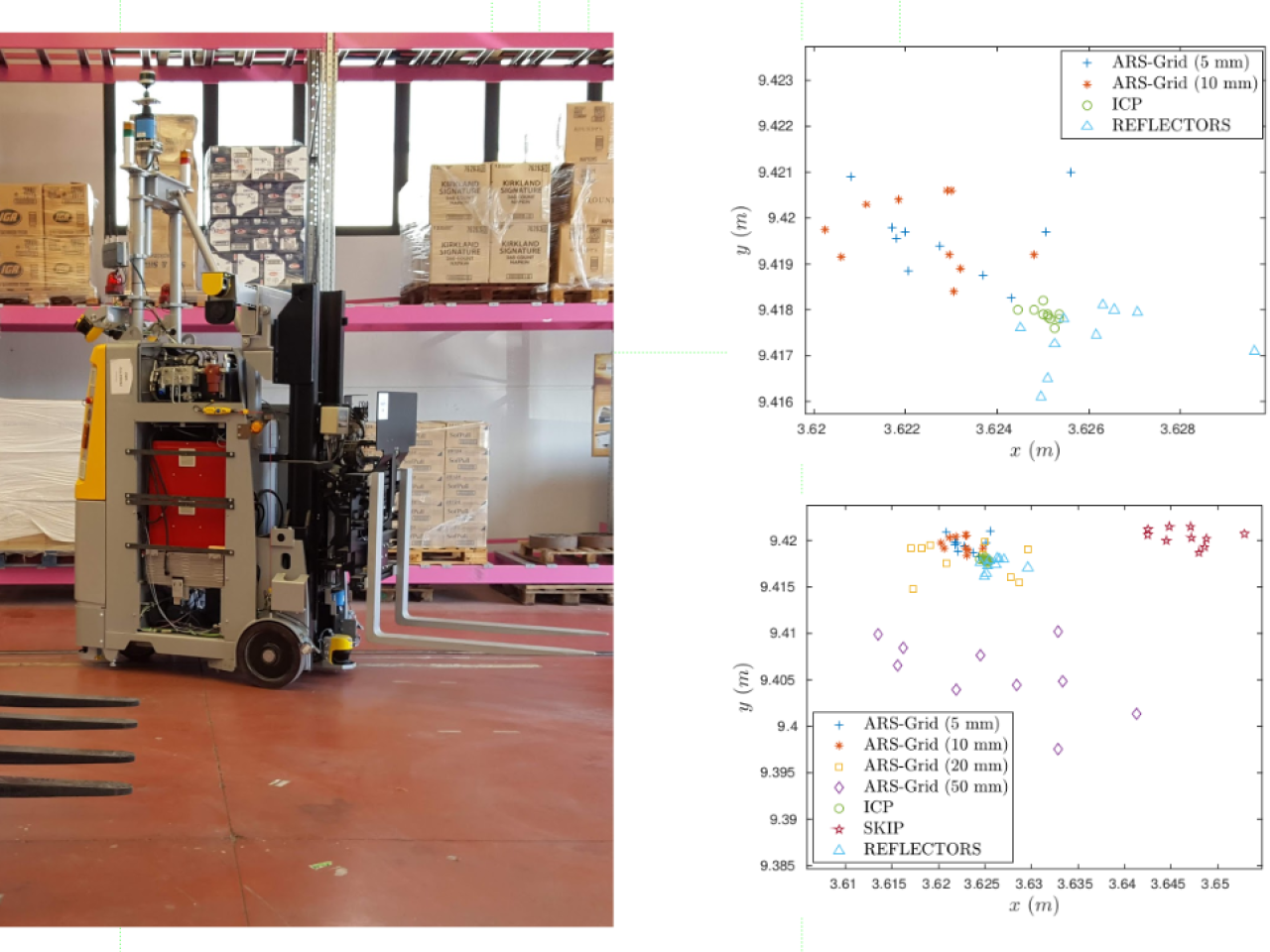 Esperimenti di localizzazione.
Esperimenti di localizzazione.