
Nelle macchine automatiche di concezione innovativa, le leggi di moto degli organi terminali (OT) possono essere variate mediante la programmazione dei profili di moto imposti dagli azionamenti elettrici. Tuttavia, gli OT hanno di norma un solo grado di libertà e non possono variare la tipologia di movimento realizzata. La sostituzione degli OT con teste robotiche a più gradi di libertà, le quali garantiscono la massima versatilità delle traiettorie da eseguire, ha permesso di realizzare un prototipo di macchina automatica con maggiore flessibilità. Un set ridotto di teste robotiche funge da insieme di moduli costitutivi della macchina. Tali moduli hanno alte prestazioni dinamiche, in virtù della scelta di architetture robotiche parallele a bassa inerzia (motori collocati a telaio) e dell’ottimizzazione dei servomotori, delle trasmissioni e delle rigidezze. I moduli rispettano i requisiti di pulizia previsti dalle normative per il settore farmaceutico (possibilità di utilizzare i rob
 Robot parallelo
Robot parallelo
È un modulo robotico a più gradi di libertà, il cui organo terminale può muoversi in un ampio spazio di lavoro seguendo traiettorie variabili in base all'applicazione. La progettazione tiene conto dei vincoli di pulizia imposti dal settore farmaceutico. Il modulo robotico può essere montato in diversi settori della macchina per svolgere operazioni differenti, variando le leggi di moto imposte dagli azionamenti elettrici. L’organo terminale è collegato al telaio mediante molteplici catene cinematiche e i motori sono tutti collocati sul telaio. Il robot è caratterizzato da elevato carico pagante, alte prestazioni dinamiche e notevole rigidezza, caratteristiche fondamentali per l’utilizzo nel settore delle macchine automatiche ad elevate prestazioni. La semplicità del sistema, e la sua conseguente economicità, permette l'utilizzo del robot anche al di fuori del settore farmaceutico.
È un modulo robotico a più gradi di libertà, il cui organo terminale può muoversi in un ampio spazio di lavoro seguendo traiettorie variabili in base all'applicazione, tenendo conto anche dei vincoli di pulizia del farmaceutico. Può essere montato in diversi settori per svolgere operazioni differenti, variando le leggi di moto imposte dagli azionamenti elettrici. Il robot è caratterizzato da elevato carico pagante, alte prestazioni dinamiche e notevole rigidezza. La semplicità del sistema, e la sua economicità, permette l'utilizzo del robot anche al di fuori del settore farmaceutico.
Macchine automatiche flessibili, modulari e con elevate prestazioni dinamiche, da impiegarsi nell’industria farmaceutica, cosmetica, alimentare, delle bevande e del tabacco
 Robot 3 gdl
Robot 3 gdl
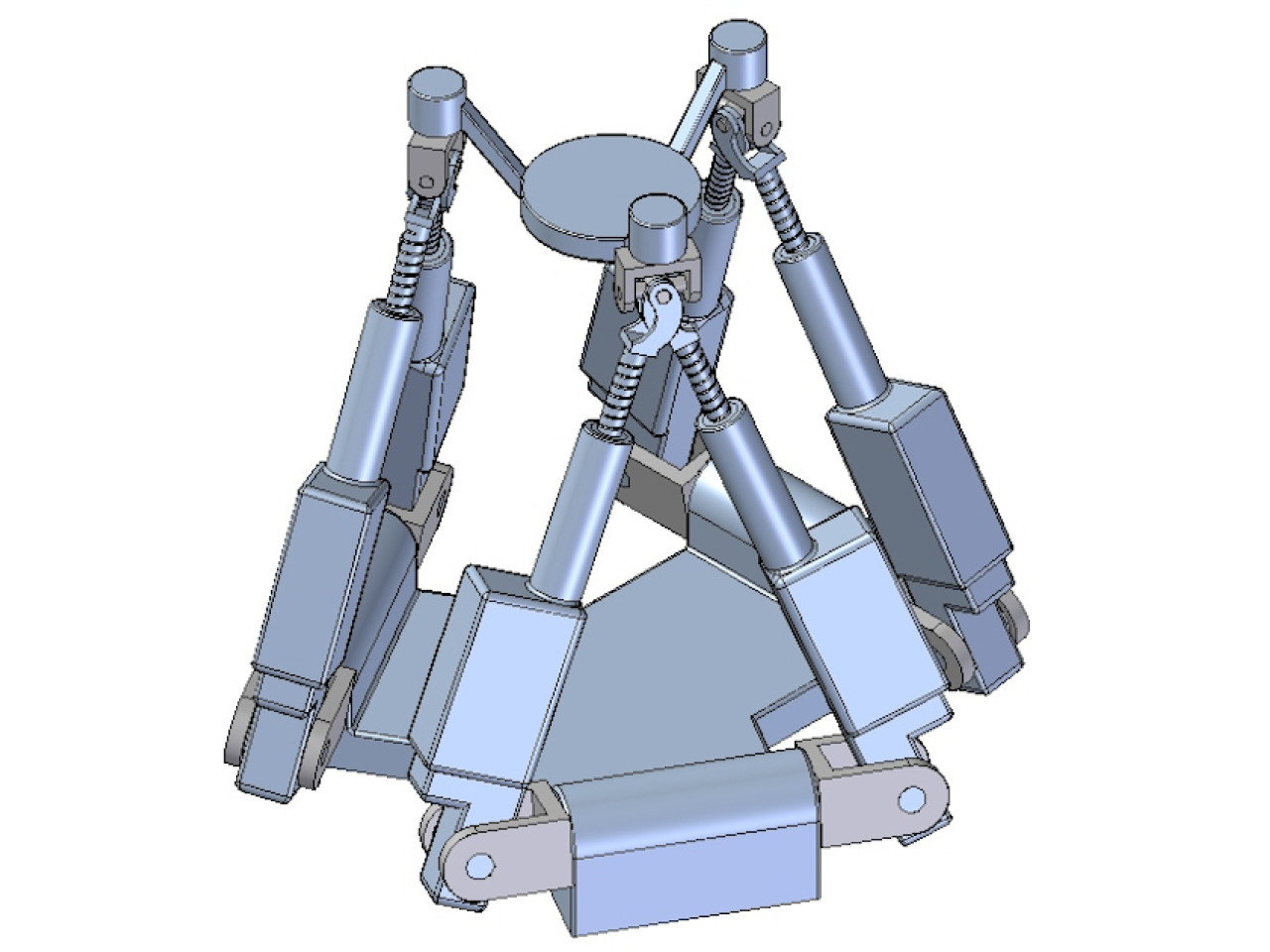
Robot a 3 gradi di libertà per assemblaggio componenti
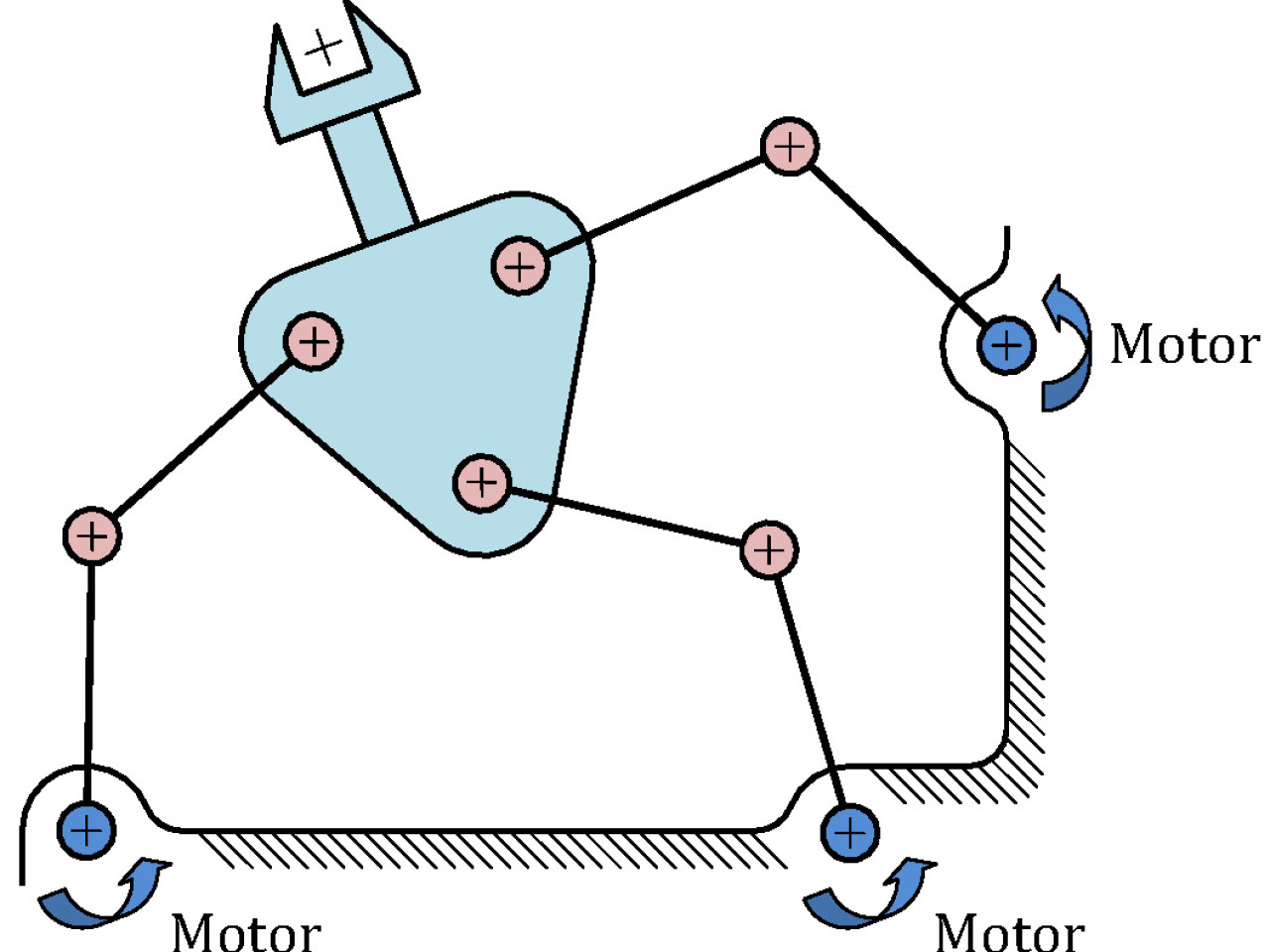
Il primo modulo robotico progettato ha 3 gradi di libertà: due traslazioni nel piano e una rotazione intorno ad un asse perpendicolare al piano stesso. Il robot è idoneo a compiere complessi movimenti di assemblaggio nel piano, compresi movimenti che includono una rotazione (molto frequente in caso di componenti a incastro). Esso è collegato al telaio mediante tre diadi. Ogni diade è costituita da due membri rigidi e contiene esclusivamente coppie cinematiche rotoidali, ovvero articolazioni di rotazione. Quest’ultimo è un requisito essenziale per l’impiego del robot nel settore farmaceutico, ove i requisiti di pulizia ed asepsi inibiscono l’uso di guide lineari. La geometria del modulo robotico è ottimizzata al fine di massimizzarne le prestazioni cinematiche e dinamiche, vale a dire: il più ampio spazio di lavoro possibile per assegnato ingombro, attuatori di minori dimensioni e potenze rispetto ai motori utilizzati in meccanismi pick&place di uso corrente, massima flessibilità delle traiettorie da eseguire, basso stato di sollecitazione meccanica dei membri e degli organi di trasmissione. Il modulo robotico è in grado di coprire un’area di lavoro corrispondente ad un rettangolo di dimensioni 200mm x 100mm. In ogni punto del rettangolo, l’organo terminale può compiere rotazioni sino a 90°. Il prototipo è attualmente in fase di costruzione.
GIMA S.p.A., gruppo IMA, leader nel settore delle Macchine Automatiche
Il robot è stato realizzato in collaborazione con un’azienda che produce macchinari per il settore farmaceutico. In virtù della sua versatilità, il modulo robotico potrà essere impiegato in tutti i settori in cui si realizzano operazioni di assemblaggio.
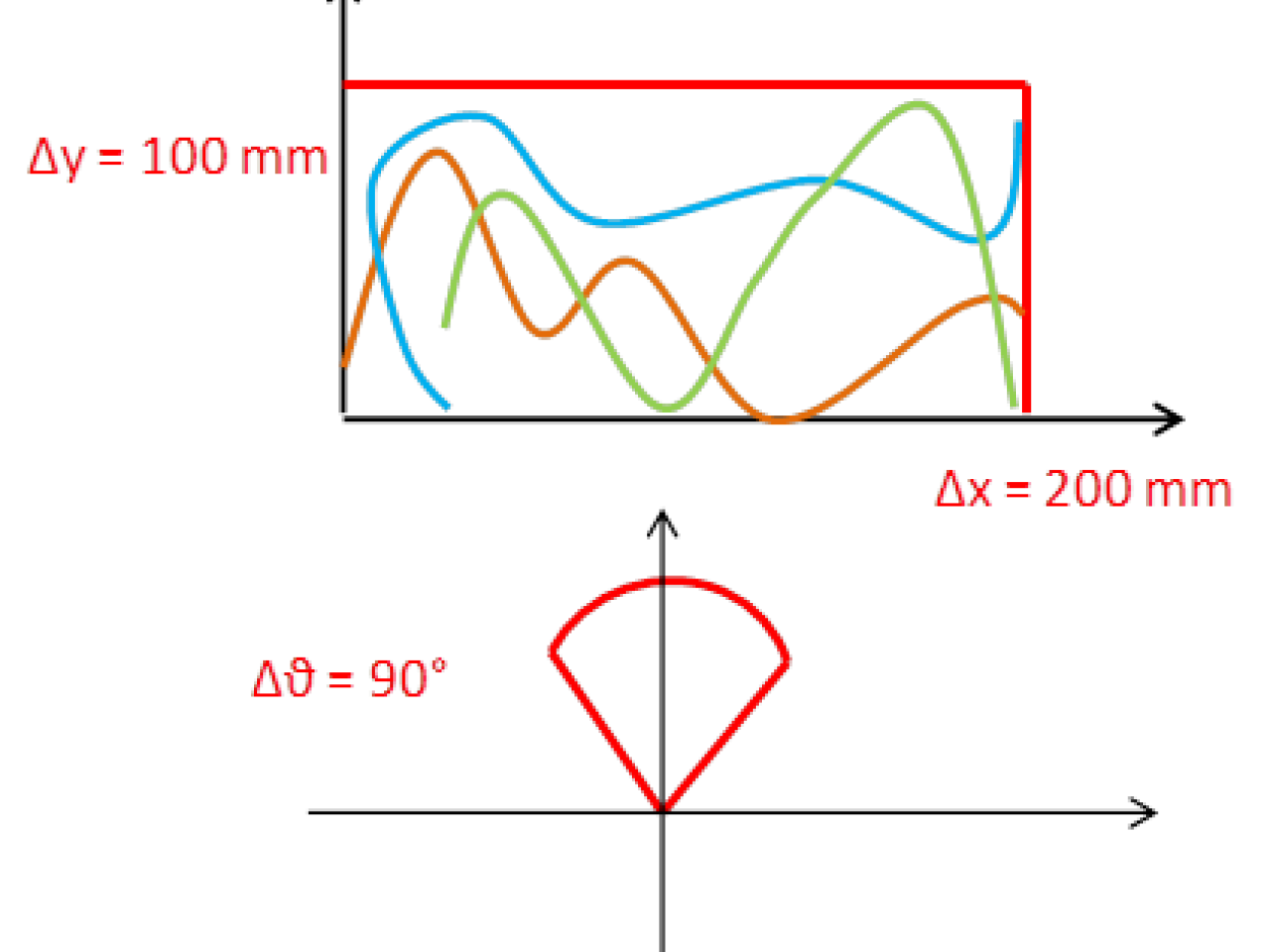 Robot a 3 gld – spazio di lavoro
Robot a 3 gld – spazio di lavoro