
Per la prima volta nella storia, durante il test PROUD-Car Test 2013 (tenutosi il 12 luglio 2013 a Parma) un veicolo senza guidatore al posto di guida si è mosso in totale sicurezza su strade cittadine aperte al traffico regolare. Recentemente altri sistemi simili sono stati realizzati da altri ricercatori e case automobilistiche di tutto il mondo, ma questa è stata la prima volta che al posto di guida non sedeva nessuno, per sottolineare l’affidabilità del sistema finale. Il veicolo non è telecomandato, ma al contrario è dotato di sensori che percepiscono l’ambiente circostante; i sistemi di bordo interpretano la situazione del traffico e reagiscono di conseguenza, attivando lo sterzo e modulando la velocità in modo autonomo (senza intervento umano).
 Il veicolo autonomo BRAiVE sviluppato dal VisLab.
Il veicolo autonomo BRAiVE sviluppato dal VisLab.
Sviluppo delle tecnologie da installarsi su un veicolo per consentirne la guida autonoma non telecomandata in ogni tipo di ambiente: rurale, autostradale, urbano. I sensori di cui e` dotato il veicolo percepiscono l’ambiente circostante mentre i sistemi di bordo interpretano la situazione del traffico e reagiscono di conseguenza, attivando lo sterzo e modulando la velocita` in modo autonomo (senza intervento umano). La parte piu` complessa di questo esperimento e` la gestione del traffico reale, sia in ambiente extraurbano (sulla tangenziale dei Parma) che in ambiente urbano (nel centro cittadino di Parma). Un elemento che ha notevolmente aumentato la complessita` e` la necessita` di attraversare rotonde (di dimensioni e sagome diverse), sottopassi, passaggi pedonali, e semafori, in quanto queste situazioni articolate richiedono una profonda interpretazione da parte del sistema di bordo.
Le caratteristiche principali dei prototipi sviluppati dal VisLab sono: - l’utilizzo di sensori di basso costo (principalmente microtelecamere) - l'integrazione spinta (i sensori sono quasi invisibili e ben integrati nello chassis del veicolo). Altri veicoli automatici sviluppati da altri centri di ricerca sono basati su tecnologie diverse, come ad esempio radar oppure un sistema laser molto performante ma che richiede un posizionamento molto invasivo sul tetto del veicolo.
Sulle strade europee perdono la vita piu` di 40.000 persone all’anno, ma il dato ancor piu` impressionante e` che piu` del 93% degli incidenti e` dovuto a cause umane: distrazione, guida sotto l’effetto di sostanze, imperizia. La guida automatica di veicoli (dove il guidatore e` sostituito da sistemi elettronici) e` da tutti vista come la soluzione definitiva al problema della mortalita` sulle strade. Una volta che questa tecnologia sara` considerata sufficientemente matura, la mobilita` di persone e merci cambiera` totalmente: tutti i veicoli saranno ..
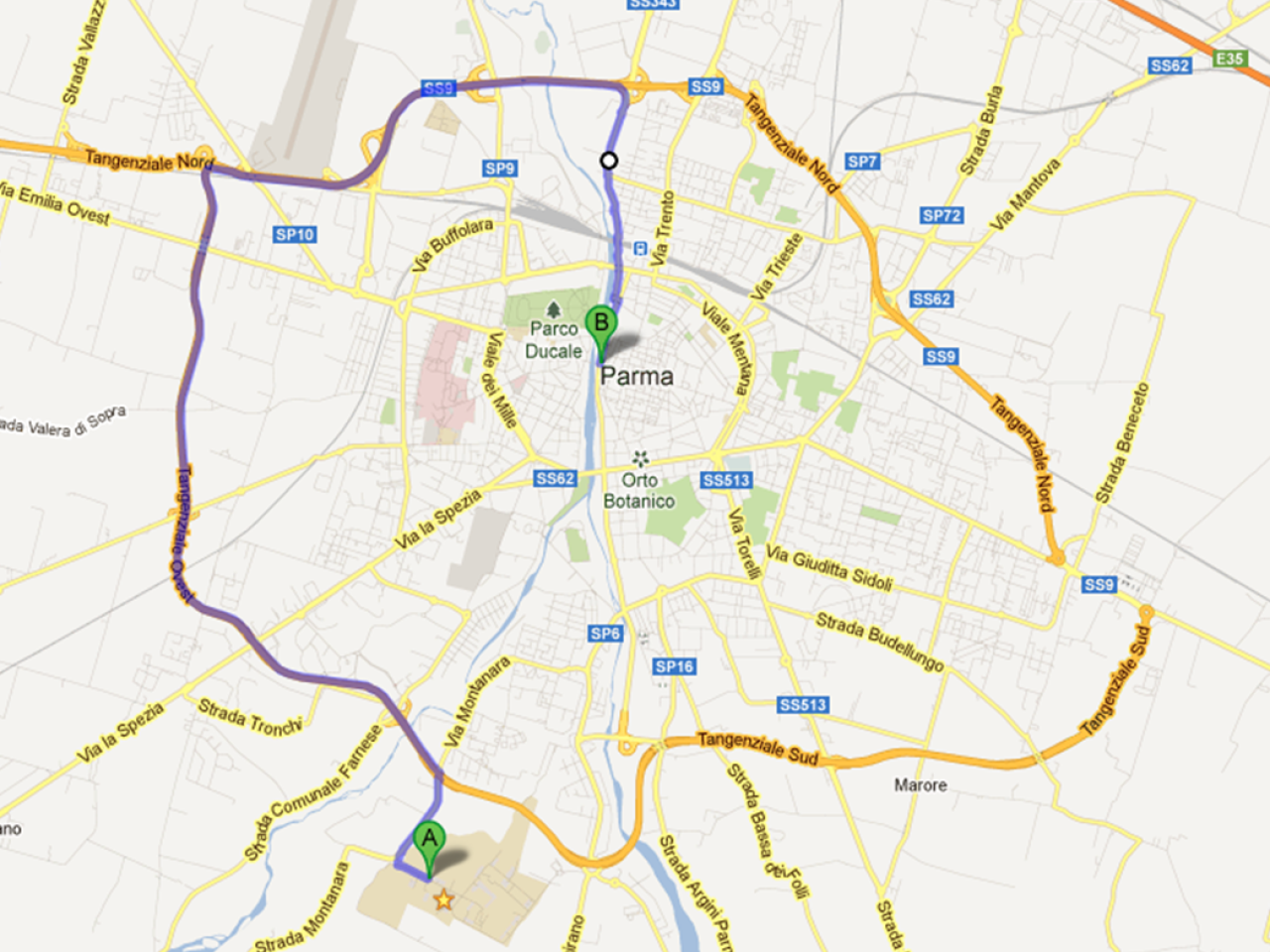 La mappa del percorso lungo le vie di Parma: dal Campus Universitario (A) a Piazzale della Pace (B).
La mappa del percorso lungo le vie di Parma: dal Campus Universitario (A) a Piazzale della Pace (B).
Guida automatica - non telecomandata - di veicoli.
Elaborazione di immagini provenienti dai diversi sensori installati sul veicolo: - due telecamere frontali per localizzare ostacoli (pedoni, biciclette, altri veicoli) sul percorso, per individuare e interpretare i semafori, per determinare la posizione della segnaletica orizzontale, e per ricostruire il profilo del terreno di fronte al veicolo - due telecamere laterali e due laserscanner laterali per gestire gli ingressi nelle rotonde - un laserscanner frontale e due laterali localizzano gli ostacoli laterali (come ad esempio veicoli in avvicinamento, guard rail e lati dei tunnel) - due telecamere laterali orientate verso la parte posteriore del veicolo per localizzare i veicoli in avvicinamento sulle corsie adiacenti. I sensori installati sul prototipo comprendono due tecnologie: telecamere e laser, che si complementano in modo molto semplice. Questo esperimento rappresenta un passo ulteriore verso la guida totalmente automatica in qualunque condizione, tuttavia il sistema correntemente in uso non e` in grado di gestire in maniera ottima alcune situazioni comuni come tra l’altro le rotonde di grandi dimensioni, le immissioni su strade con diritto di precedenza, i semafori multipli, e la gestione di lavori in corso.
ERC, Fondazione Cariparma, Ministero dell'Interno, Regione Emilia-Romagna, ANAS, DISS, Polizia di Stato, Camera di Commercio di Parma, SI.SE srl.
Con questo test l’Italia si trova in primo piano per quanto riguarda le sperimentazioni di nuove tecnologie sulle strade pubbliche; altri Paesi al mondo hanno già adottato o stanno per adottare legislazioni specifiche. La possibilità di effettuare test in ambiente aperto al traffico pubblico (contrapposto a circuiti di prova chiusi al traffico) è di importanza basilare per la validazione
 Esempio di situazione affrontata da BRAiVE: guida attraverso uno dei tunnel della tangenziale.
Esempio di situazione affrontata da BRAiVE: guida attraverso uno dei tunnel della tangenziale.