
For the first time in history, during the PROUD-Car Test 2013 (held on 12 July 2013 in Parma) a driver-less vehicle navigated town streets open to regular traffic in total safety. Recently, other similar systems have been developed by other researchers and car companies worldwide, but this was the first time there was no-one in the driver's seat, to underline the reliability of the final system. The vehicle is not remotely controlled, but it is equipped with sensors that perceive the surrounding environment; on-board systems interpret the traffic situation and react accordingly, activating the steering wheel and modulating speed autonomously (with no human intervention).
 The BRAiVE autonomous vehicle developed by VisLab.
The BRAiVE autonomous vehicle developed by VisLab.
The main features of the prototypes developed by VisLab are: the use of low-cost sensors (mainly micro-video cameras) cutting-edge integration (the sensors are almost invisible and well-integrated in the vehicle's chassis). Other automatic vehicles developed by other research centres are based on different technologies, such as radar or a high-performance laser system which, however, requires very invasive positioning on the vehicle's roof.
More than 40,000 people lose their lives on European roads each year, but the even more striking figure is that more than 93% of accidents is due to human causes: distraction, driving under the influence of substances, inexperience. Driving vehicles automatically (where the driver is replaced by electronic systems) is considered by all as the definitive solution to the problem of road traffic deaths.
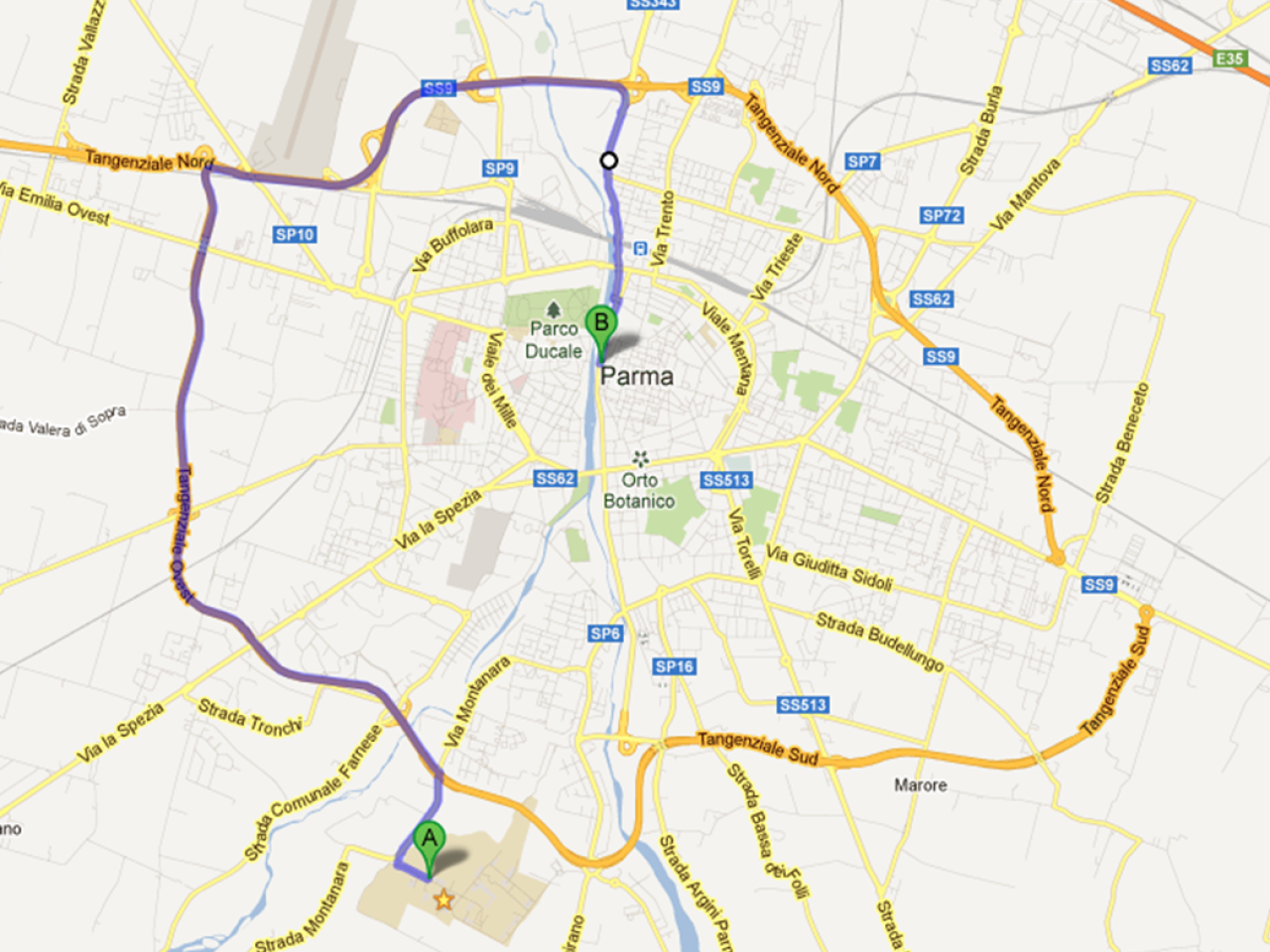 The map of the route along Parma's streets: from the University Campus (A) to Piazzale della Pace(B)
The map of the route along Parma's streets: from the University Campus (A) to Piazzale della Pace(B)
Automatic driving - non remotely controlled - of vehicles.
Processing of images from the various sensors installed on the vehicle: two front video cameras to locate obstacles (pedestrians, bicycles, other vehicles) on the route, to identify and interpret traffic lights, to ascertain the position of road markings, and to reconstruct the profile of the terrain in front of the vehicle two side video cameras and two side laser scanners to manage entry into roundabouts a front laser scanner and two side ones locate side obstacles (such as approaching vehicles, guard rails and tunnel sides) two side video cameras pointing at the rear of the vehicle to locate approaching vehicles on the adjacent lanes. The sensors installed on the prototype include two technologies: video cameras and laser, which integrate in a very simple manner. This experiment represents a further step towards totally automatic driving in any condition, however the system currently used is unable to optimally manage certain common situations such as, among others, large roundabouts, entries on roads with right of way, multiple traffic lights and road repairs.
ERC Cariparma Foundation Ministry of Interior Emilia-Romagna Region ANAS. DISS State Police Parma Chamber of Commerce SI.SE srl
With this test, Italy is at the forefront with regards to the experimentation of new technologies on public roads; other countries in the world have already adopted or are about to adopt specific legislation. The possibility to perform tests in settings open to public traffic (as opposed to test circuits closed to the traffic) is crucial for validating the overall system
 Example of a situation handled by BRAiVE: driving through one of the ring road tunnels.
Example of a situation handled by BRAiVE: driving through one of the ring road tunnels.